Wir freuen uns, dass es nun eine Version des Tools gibt, die sich im Alltag sinnvoll einsetzen lässt. Der Weg bis hierhin war lang – aber dank der guten Zusammenarbeit in der OSM-Community haben wir jetzt eine Lösung, die praktisch nutzbar ist.
Worum geht es?
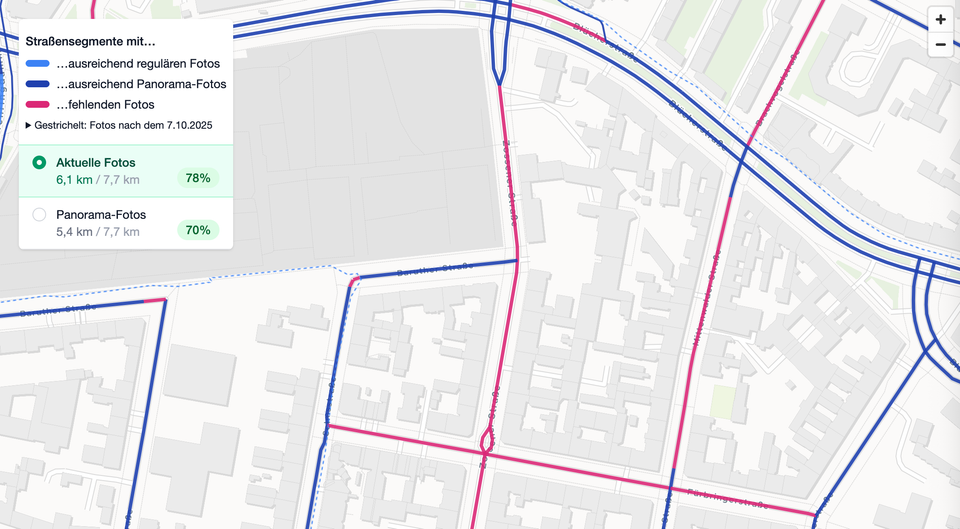
Das Ziel des Tools ist es, auf einfache Weise zu erkennen, wo aktuelle Mapillary-Fotos fehlen. Wenn du also eine Fahrt oder Tour planst, kannst du auf der Karte nach pinken Linien suchen – sie markieren Abschnitte, an denen laut Analyse keine aktuellen Fotos vorhanden sind. So lässt sich gezielt entscheiden, welche Strecken neue Aufnahmen brauchen.
Funktionsweise
Die Karte zeigt die Verfügbarkeit von Mapillary-Fotos auf Basis des OSM-Straßen- und Wegenetzes. Diese Daten müssen manuell aktualisiert werden – wir bemühen uns, dies regelmäßig zu tun, mindestens aber alle sechs Monate.
Da dieser Zeitraum recht lang ist, werden zusätzlich alle Mapillary-Sequenzen (Linien) eingeblendet, die seit der letzten Veröffentlichung aufgenommen wurden. Ab Zoomstufe 14 kann man also gut erkennen, ob ein Abschnitt, der in Pink als „fehlend“ markiert ist, mittlerweile durch eine blaue, gepunktete Mapillary-Linie abgedeckt wurde.
Technische Hintergründe
Die Daten zur Mapillary-Abdeckung werden von einem Tool erzeugt, das von vizsim entwickelt wurde und unter github.com/vizsim/mapillary_coverage gepflegt wird.
Das Tool lädt die Vector-Tile-Daten von Mapillary für ganz Deutschland herunter und verschneidet sie mit dem OSM-Straßennetz. Diese Ergebnisse werden anschließend im Rahmen der osm2gpsql-Prozessierung in TILDA Radverkehr als CSV eingelesen und mit den dortigen Straßen- und Radinfrastruktur-Daten verknüpft.
Die Integration in TILDA läuft bereits seit einiger Zeit und bildet die Grundlage für aktuelle Kampagnen auf radinfra.de, bei denen Wege mit Mapillary-Fotos bevorzugt werden – was das sogenannte „Sofa-Mapping“ deutlich erleichtert. Nun nutzen wir die gleichen Daten auch in dieser Ansicht auf osm-verkehrswende.org, speziell optimiert für die Planung von Foto-Touren.
Hintergrund des Projekts
Vielleicht kommt euch die Seite bekannt vor – an dieser Stelle stand bereits früher ein Proof of Concept, der während des OSM Hackweekends Ende 2023 entstanden war. Der damalige Code (osmberlin/mapillary-missing-streets) wurde inzwischen archiviert, da er keine größeren Datenmengen performant verarbeiten konnte.
Beim Hackweekend 2025 wurde das Thema erneut aufgegriffen, und daraus entstand der Ansatz, der nun umgesetzt wurde.
Datenverarbeitung im Detail
Der neue Ansatz von vizsim ist bewusst pragmatisch gewählt, um die benötigten Daten überhaupt generieren zu können. Anstatt die Mapillary-API zu nutzen, werden die Vector Tiles direkt vom Mapillary-Endpunkt geladen. Dabei werden ausschließlich die Linien der Foto-Sequenzen verwendet, nicht die einzelnen Punktdaten.
Die Sequenzen werden um 10 m gepuffert und mit einem gefilterten OSM-Straßennetz verschnitten. Nur Wege mit mindestens 60 % Überlappung gelten als „erfasst“. Berücksichtigt werden ausschließlich Fotos, die nach dem 1. Januar 2023 aufgenommen wurden. Unterschieden wird außerdem, ob Panorama-Fotos oder nur reguläre Aufnahmen vorhanden sind.
Mitmachen
Wenn du selbst mithelfen möchtest, findest du erste Informationen unter radinfra.de/mitmachen/fotos
Jedes Foto hilft – auch wenn es nur mit einer Handy-Kamera aufgenommen wurde. Und wenn du richtig einsteigen willst, schau beim Kameraverleih der OSM-Community Berlin vorbei.